Moment siły


Moment siły[a]F{displaystyle F}


- M→o=r→×F→.{displaystyle {vec {M}}_{o}={vec {r}}times {vec {F}}.}
- M→o=r→×F→.{displaystyle {vec {M}}_{o}={vec {r}}times {vec {F}}.}

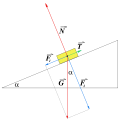
Wektor momentu siły jest wektorem osiowym (pseudowektorem), zaczepiony jest w punkcie O, a jego kierunek jest prostopadły do kierunku płaszczyzny wyznaczonej przez wektor F→{displaystyle {vec {F}}}

Określa się także moment siły względem osi, jest on równy rzutowi wektora momentu siły na tę prostą.
Współrzędne Mx,My,Mz{displaystyle M_{x},M_{y},M_{z}}


Jednostką momentu siły jest niutonometr [Nm]. Jednostka ta jest zdefiniowana analogicznie jak dżul, czyli jednostka energii. Aby unikać nieporozumień, nie nazywa się niutonometra dżulem.
W przypadku dźwigni dwustronnej o nierównych ramionach pozostanie ona w równowadze, gdy wartości momentów sił przyłożone do obu ramion będą równe, a ściślej, gdy suma wektorów momentów będzie równa zeru:
- r→1×F→1+r→2×F→2=0{displaystyle {vec {r}}_{1}times {vec {F}}_{1}+{vec {r}}_{2}times {vec {F}}_{2}=0}
- r→1×F→1+r→2×F→2=0{displaystyle {vec {r}}_{1}times {vec {F}}_{1}+{vec {r}}_{2}times {vec {F}}_{2}=0}


W przypadku pokazanym na rysunku, gdy siły P1 i P2 są prostopadłe do wektorów r1 i r2
- r1⋅P1−r2⋅P2=0{displaystyle r_{1}cdot P_{1}-r_{2}cdot P_{2}=0}
- r1⋅P1−r2⋅P2=0{displaystyle r_{1}cdot P_{1}-r_{2}cdot P_{2}=0}

Związek z mocą |
Znając moc P{displaystyle P}

- P=dWdt=Fdsdt=Frdαdt{displaystyle P={frac {dW}{dt}}={frac {Fds}{dt}}={frac {Frdalpha }{dt}}}
- P=Mω{displaystyle P=Momega }
- P=dWdt=Fdsdt=Frdαdt{displaystyle P={frac {dW}{dt}}={frac {Fds}{dt}}={frac {Frdalpha }{dt}}}


gdzie
W – praca
r – ramię przyłożenia siły, mierzone od osi obrotu urządzenia.
W ten sposób można wyznaczyć na przykład moment obrotowy wału.
Zobacz też |
- moment bezwładności
Uwagi |
↑ W inżynierii stosuje się terminy „moment obrotowy”, „moment skręcający” i inne.
| |||||||||||||||||||
Kontrola autorytatywna (wielkość wektorowa):
GND: 4012932-9


