Układ współrzędnych biegunowych
Układ współrzędnych biegunowych (układ współrzędnych polarnych) – układ współrzędnych na płaszczyźnie wyznaczony przez pewien punkt O zwany biegunem oraz półprostą OS o początku w punkcie O zwaną osią biegunową.
Spis treści
1 Definicja
2 Rys historyczny
3 Związek z układem kartezjańskim
3.1 Przejście od układu biegunowego do kartezjańskiego
3.2 Przejście od układu kartezjańskiego do biegunowego
4 Krzywe w układzie biegunowym
4.1 Okrąg
4.2 Róża
4.3 Spirala Archimedesa
4.4 Prosta
5 Pole powierzchni ograniczonej wykresem funkcji
6 Długość łuku wykresu funkcji
7 Liczby zespolone
8 Zobacz też
9 Przypisy
Definicja |

Każdemu punktowi P płaszczyzny przypisujemy jego współrzędne biegunowe, jak następuje[1]:
promień wodzący punktu P to jego odległość |OP| od bieguna,
amplituda punktu P to wartość kąta skierowanego pomiędzy półprostą OS a wektorem OP→.{displaystyle {overrightarrow {OP}}.}

Dla jednoznaczności przyjmuje się, że współrzędne bieguna O są równe (0,0).{displaystyle (0,0).}


Rys historyczny |
Układ współrzędnych biegunowych został wprowadzony i rozwinięty w Europie w XVII wieku. Według Juliana Coolidge’a[2] pierwszeństwo w używaniu tego układu należy przyznać albo Grégoire de Saint-Vincentowi lub Bonaventurze Cavalieriemu.
- Cavalieri[3] użył współrzędnych biegunowych aby wyznaczyć pole obszaru ograniczonego spiralą Archimedesa (a ściślej mówiąc jej pierwszym „obrotem”).
- W 1647 de Saint-Vincent opublikował pracę, w której używał współrzędnych biegunowych i twierdził, że znał tę metodę już w 1625.
- W 1658, Blaise Pascal używa układu biegunowego w wyznaczeniu długości pewnych łuków. Trzy lata później podobnej metody użył szkocki matematyk James Gregory.
Isaac Newton[4] dyskutuje różne układy współrzędnych i w pewnych przypadkach używa układu biegunowego.- Za twórcę biegunowego układu współrzędnych w jego współczesnej formie uważa się Jakoba Bernoulliego, który używał tego układu w badaniach krzywizny pewnych krzywych.
Związek z układem kartezjańskim |

Rysunek pokazujący związek układów biegunowego i kartezjańskiego
Rozważmy dwa układy współrzędnych na płaszczyźnie: układ kartezjański OXY{displaystyle OXY}


Przejście od układu biegunowego do kartezjańskiego |
Dla danego wektora wodzącego r⩾0{displaystyle rgeqslant 0}

- x=r⋅cosφ,{displaystyle x=rcdot cos varphi ,}
- y=r⋅sinφ.{displaystyle y=rcdot sin varphi .}


Jakobian przejścia wynosi
D(x,y)D(r,φ)=|∂x∂r∂x∂φ∂y∂r∂y∂φ|=|cosφ−rsinφsinφrcosφ|{displaystyle {frac {D(x,y)}{D(r,varphi )}}=left|{begin{matrix}{frac {partial x}{partial r}}&{frac {partial x}{partial varphi }}\{frac {partial y}{partial r}}&{frac {partial y}{partial varphi }}end{matrix}}right|=left|{begin{matrix}cos varphi &-rsin varphi \sin varphi &rcos varphi end{matrix}}right|}=r(cos2φ+sin2φ)=r.{displaystyle =r(cos ^{2}varphi +sin ^{2}varphi )=r.}

Przejście od układu kartezjańskiego do biegunowego |
Rozważmy punkt o współrzędnych kartezjańskich (x,y).{displaystyle (x,y).}
r=x2+y2{displaystyle r={sqrt {x^{2}+y^{2}}}}[7][6].
Jeśli r≠0{displaystyle rneq 0}

tgφ=yx{displaystyle operatorname {tg} ,varphi ={tfrac {y}{x}}}[7],
zatem amplituda φ{displaystyle varphi }
φ=arctg(yx){displaystyle varphi =operatorname {arctg} ;({tfrac {y}{x}})}[8]
(o ile dopuszczamy ujemne wartości φ{displaystyle varphi }
Natomiast aby otrzymać 0⩽φ<2π,{displaystyle 0leqslant varphi <2pi ,}
- φ={arctg(yx),gdy x>0 oraz y⩾0arctg(yx)+2π,gdy x>0 oraz y<0arctg(yx)+π,gdy x<0π2,gdy x=0 oraz y>03π2,gdy x=0 oraz y<0,{displaystyle varphi ={begin{cases}operatorname {arctg} ;({tfrac {y}{x}}),&{mbox{gdy }}x>0{mbox{ oraz }}ygeqslant 0\operatorname {arctg} ;({tfrac {y}{x}})+2pi ,&{mbox{gdy }}x>0{mbox{ oraz }}y<0\operatorname {arctg} ;({tfrac {y}{x}})+pi ,&{mbox{gdy }}x<0\{tfrac {pi }{2}},&{mbox{gdy }}x=0{mbox{ oraz }}y>0\{tfrac {3pi }{2}},&{mbox{gdy }}x=0{mbox{ oraz }}y<0end{cases}},}

gdzie arctg{displaystyle operatorname {arctg} }

- φ=arccos(xr)sgn(y),{displaystyle varphi =arccos({tfrac {x}{r}});operatorname {sgn} (y),}

gdzie sgn{displaystyle operatorname {sgn} }
Krzywe w układzie biegunowym |
Dla szeregu krzywych algebraicznych ich równania przedstawione w układzie biegunowym cechują się dużą symetrią lub pewną prostotą. Równania te nazywamy równaniami biegunowymi krzywych.
Okrąg |

Okrąg o równaniu r=1{displaystyle r=1}

Okrąg o środku w punkcie (r0,φ0){displaystyle (r_{0},varphi _{0})}

- r2−2rr0cos(φ−φ0)+r02=a2.{displaystyle r^{2}-2rr_{0}cos(varphi -varphi _{0})+r_{0}^{2}=a^{2}.}

W szczególnym przypadku gdy środek znajduje się w biegunie układu współrzędnych, powyższe równanie przybiera szczególnie prostą postać:
- r=a.{displaystyle r=a.}

Róża |
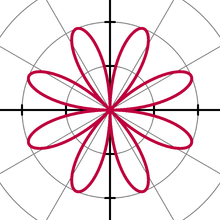
Róża o równaniu r=2sin(4φ){displaystyle r=2sin(4varphi )}

Krzywa znana pod nazwą róży lub róży polarnej opisana jest przez równanie
- r=acos(kφ+φ0),{displaystyle r=acos(kvarphi +varphi _{0}),}

gdzie φ0{displaystyle varphi _{0}}

Jeśli k jest nieparzystą liczbą całkowitą, to róża będzie miała k płatków, a jeśli k jest parzystą liczbą całkowitą, to róża będzie miała 2k{displaystyle 2k}
Spirala Archimedesa |

Jedno ramię spirali Archimedesa o równaniu r=φ{displaystyle r=varphi }
 dla 0<φ<6π{displaystyle 0<varphi <6pi }
dla 0<φ<6π{displaystyle 0<varphi <6pi }
Spirala Archimedesa jest przedstawiona przez równanie
- r=a+bφ.{displaystyle r=a+bvarphi .}

Parametry a,b{displaystyle a,b}
Prosta |
Prosta radialna, tzn. prosta przechodząca przez biegun, jest zadana przez równanie
- φ=φ0,{displaystyle varphi =varphi _{0},}

gdzie φ0{displaystyle varphi _{0}}
Prosta nieradialna, która jest prostopadła do prostej radialnej
- φ=φ0{displaystyle varphi =varphi _{0}}

i przecina ją w punkcie (r0,φ0),{displaystyle (r_{0},varphi _{0}),}
- r=r0sec(φ−φ0).{displaystyle r=r_{0}sec(varphi -varphi _{0}).}

Pole powierzchni ograniczonej wykresem funkcji |
Tak jak w układzie kartezjańskim powierzchnię wykresu funkcji f{displaystyle f}











- dS(φ)=12r(φ)r(φ)sin(dφ)=12r2(φ)⋅sin(dφ)dφ⋅dφ{displaystyle dS(varphi )={frac {1}{2}}r(varphi )r(varphi )sin(dvarphi )={frac {1}{2}}r^{2}(varphi )cdot {frac {sin(dvarphi )}{dvarphi }}cdot dvarphi }

Ponieważ limdφ→0sin(dφ)dφ=1,{displaystyle lim _{dvarphi to 0}{frac {sin(dvarphi )}{dvarphi }}=1,}
- dS(φ)=12r2(φ)dφ{displaystyle dS(varphi )={frac {1}{2}}r^{2}(varphi )dvarphi }

Tak więc pole powierzchni S{displaystyle S}
- S=∫αβdS(φ)=∫αβ12r2(φ)dφ=12∫αβr2(φ)dφ{displaystyle S=int _{alpha }^{beta }dS(varphi )=int _{alpha }^{beta }{frac {1}{2}}r^{2}(varphi )dvarphi ={frac {1}{2}}int _{alpha }^{beta }r^{2}(varphi )dvarphi }

Długość łuku wykresu funkcji |
W układzie współrzędnych biegunowych, powierzchnię wykresu funkcji r{displaystyle r}






















- 2γ+dφ=π{displaystyle 2gamma +dvarphi =pi }
- 2γ=π−dφ{displaystyle 2gamma =pi -dvarphi }
- γ=π−dφ2{displaystyle gamma ={frac {pi -dvarphi }{2}}}



Ponieważ dφ→0,{displaystyle dvarphi to 0,}
- γ→π2{displaystyle gamma to {frac {pi }{2}}}

Kąty γ{displaystyle gamma }
- γ+δ=π{displaystyle gamma +delta =pi }
- δ=π−γ=π−π−dφ2=π+dφ2{displaystyle delta =pi -gamma =pi -{frac {pi -dvarphi }{2}}={frac {pi +dvarphi }{2}}}


Ponieważ dφ→0,{displaystyle dvarphi to 0,}
- δ→π2{displaystyle delta to {frac {pi }{2}}}

Skoro więc kąt δ{displaystyle delta }


- |PQ|2=|PR|2+|QR|2{displaystyle |PQ|^{2}=|PR|^{2}+|QR|^{2}}
- dL2=|PR|2+dr2(φ){displaystyle dL^{2}=|PR|^{2}+dr^{2}(varphi )}


Długość podstawy |PR|{displaystyle |PR|}
- |PR|2=r2(φ)+r2(φ)−2r(φ)r(φ)cos(dφ)=2r2(φ)−2r2(φ)cos(dφ)=2r2(φ)(1−cos(dφ)){displaystyle |PR|^{2}=r^{2}(varphi )+r^{2}(varphi )-2r(varphi )r(varphi )cos(dvarphi )=2r^{2}(varphi )-2r^{2}(varphi )cos(dvarphi )=2r^{2}(varphi )(1-cos(dvarphi ))}

Powyższe otrzymane wyrażenie podstawiamy do wcześniejszej zależności wynikającej z twierdzenia Pitagorasa:
- dL2=2r2(φ)(1−cos(dφ))+dr2(φ)=(2r2(φ)⋅1−cos(dφ)dφ2+(dr(φ)dφ)2)dφ2=(2r(φ)2⋅1−cos(dφ)dφ2+r′(φ)2)dφ2{displaystyle dL^{2}=2r^{2}(varphi )(1-cos(dvarphi ))+dr^{2}(varphi )=left(2r^{2}(varphi )cdot {frac {1-cos(dvarphi )}{dvarphi ^{2}}}+left({frac {dr(varphi )}{dvarphi }}right)^{2}right)dvarphi ^{2}=left(2r(varphi )^{2}cdot {frac {1-cos(dvarphi )}{dvarphi ^{2}}}+r'(varphi )^{2}right)dvarphi ^{2}}

Ponieważ limdφ→01−cos(dφ)dφ2=12,{displaystyle lim _{dvarphi to 0}{frac {1-cos(dvarphi )}{dvarphi ^{2}}}={frac {1}{2}},}
- dL2=((⧸2r(φ)2⋅1⧸2+r′(φ)2)dφ2=(r(φ)2+r′(φ)2)dφ2{displaystyle dL^{2}=left((not 2r(varphi )^{2}cdot {frac {1}{not 2}}+r'(varphi )^{2}right)dvarphi ^{2}=(r(varphi )^{2}+r'(varphi )^{2})dvarphi ^{2}}

Tak więc różniczka łuku dL{displaystyle dL}
- dL(φ)=r(φ)2+r′(φ)2dφ{displaystyle dL(varphi )={sqrt {r(varphi )^{2}+r'(varphi )^{2}}}dvarphi }

Długość łuku L{displaystyle L}
- L=∫αβdL(φ)=∫αβr(φ)2+r′(φ)2dφ{displaystyle L=int _{alpha }^{beta }dL(varphi )=int _{alpha }^{beta }{sqrt {r(varphi )^{2}+r'(varphi )^{2}}}dvarphi }

Liczby zespolone |
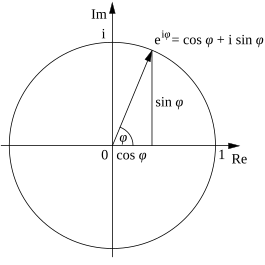
Postaci trygonometryczna i wykładnicza liczb zespolonych
Liczby zespolone mogą być przedstawiane jako punkty na płaszczyźnie zespolonej. Wówczas możemy je opisywać albo używając układu kartezjańskiego:
- z=x+iy{displaystyle z=x+iy}

albo podając je w układzie biegunowym, otrzymując tzw. postać trygonometryczną liczby zespolonej z:{displaystyle z{:}}

- z=r⋅(cos(φ)+isin(φ)).{displaystyle z=rcdot (cos(varphi )+isin(varphi )).}

(Powyżej, r{displaystyle r}
Postać trygonometryczna liczby zespolonej jest przekształcana do postaci wykładniczej
- z=reiφ,{displaystyle z=re^{ivarphi },}

gdzie e to liczba Eulera.
Użyteczność postaci trygonometrycznej i wykładniczej liczb zespolonych wynika m.in. z faktu, że mnożenie, dzielenie i potęgowanie liczb w tych postaciach jest szczególnie proste:
- r0eiθ0⋅r1eiθ1=r0r1ei(θ0+θ1),{displaystyle r_{0}e^{itheta _{0}}cdot r_{1}e^{itheta _{1}}=r_{0}r_{1}e^{i(theta _{0}+theta _{1})},}
- r0eiθ0r1eiθ1=r0r1ei(θ0−θ1),{displaystyle {frac {r_{0}e^{itheta _{0}}}{r_{1}e^{itheta _{1}}}}={frac {r_{0}}{r_{1}}}e^{i(theta _{0}-theta _{1})},}
- (reiθ)n=rneinθ.{displaystyle (re^{itheta })^{n}=r^{n}e^{intheta }.}



Zobacz też |
- układ współrzędnych astronomicznych
- układ współrzędnych sferycznych
- współrzędne geograficzne
Przypisy |
↑ Leja, Franciszek: Geometria analityczna. Wydanie 6. Państ. Wyd. Naukowe, Warszawa 1976, strona 45.
↑ Coolidge, Julian: The Origin of Polar Coordinates. „The American Mathematical Monthly” 59 (1952), s. 78–85.
↑ Cavalieri, Bonaventura: Geometria indivisilibus continuorum. Bonn 1653. (Pierwsze wydanie ukazało się w 1635.).
↑ Newton: The Method of Fluxions. Londyn 1736. (Napisane w 1671).
↑ Składowe wektora i współrzędne punktu. W: Marceli Stark: Geometria analityczna. Warszawa: Polskie Towarzystwo Matematyczne, 1951, s. 66, seria: Monografie matematyczne, t. 26. OCLC 887752.
↑ ab I.N. Bronsztejn, K.A. Siemiendiajew: Matematyka. Poradnik encyklopedyczny. Wyd. 13. Warszawa: PWN, 1996, s. 258. ISBN 83-01-11658-7.
↑ ab Składowe wektora i współrzędne punktu. W: Marceli Stark: Geometria analityczna. Warszawa: Polskie Towarzystwo Matematyczne, 1951, s. 67, seria: Monografie matematyczne, t. 26. OCLC 887752.
↑ Granino A. Korn, Theresa M. Korn: Mathematical Handbook for Scientists and Engineers. Wyd. 2. Mineola, New York: Dover Publications, 2000, s. 35. ISBN 0-486-41147-8.


